
【ワンドラ・チャレンジ】 女神湖氷上ドライブ・レポート(3) クルマは月だ、月になるんだ
2012.02.15「【ワンドラ・チャレンジ】 女神湖氷上ドライブ・レポート(2) 基礎練習と限界チャレンジ」のつづき。
普段はタイヤががっちり路面をグリップしていますが、氷上だと大違い。物理法則をモロに感じることになります。
物理法則とは、クルマの重量バランスだったり、駆動方式だったり、慣性の法則であったり。とにかくグリップしない、摩擦係数がゼロに近くなることでそれまで誤魔化せていたものが、とたんに浮彫になるから面白いものです。
定常円旋回を考えてみましょう。
一見一番簡単そうに見える、クルクル回るだけのコース。普段ならハンドルをきってぐるぐるまわればいいだけです。ところがハンドルきっても曲がらないんですよ。
曲がらない原因はカンタンで、タイヤがグリップしないから。
そしてももう一つの原因は慣性です。
クルマが走っている、前に進むということは慣性の法則、まっすぐ進もうという慣性が働きます。
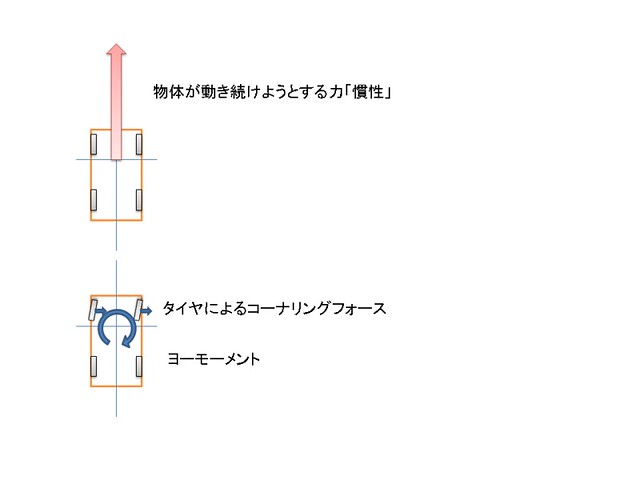
慣性の法則 慣性の法則物体に力がはたらかないとき(または力がつり合っているとき)
・静止していた物体はいつまでも静止している
・運動していた物体はその速さで等速直線運動を続ける物体がその運動の状態を続けようとする性質を慣性といいます。この性質は質量が大きいほど大きいです。
つまりパイロンの横を過ぎてハンドルを切っても、慣性が強すぎて寄るどころかどんどんと離れて行ってしまうことに。いわば衛星軌道に投入しようとした人工衛星が軌道投入失敗して、離れていってしまうかのよう。
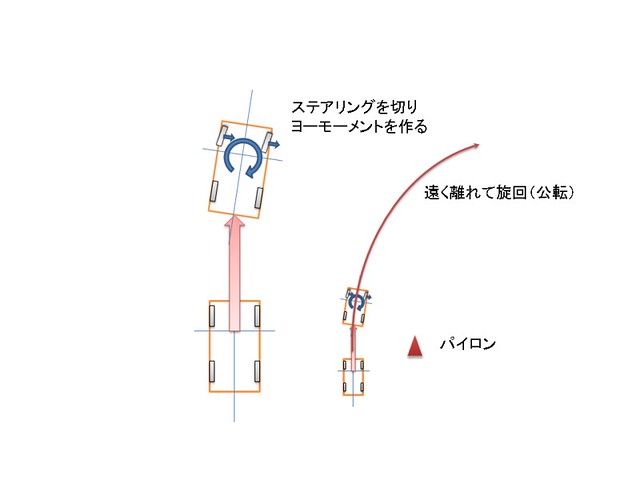
もちろんバイロンは風に飛ばされるほど軽い質量ですから、万有引力もほぼ皆無(笑)。あとは自分のトラクションとヨーモーメントで衛星軌道上に乗るしかないわけです。
そのためにはどうしたらいいか。
与えられた手段は2つ。ハンドルとアクセル(とブレーキ)。
フットブレーキはABSでまったく効きませんから実質はアクセルオフ=エンジンブレーキ程度となります。
【駆動方式:FR】
でこのハンドルとアクセルが作用するのが、FRであればそれぞれ別でハンドルはフロント、アクセルはリアです。
ハンドルもそんなに効くわけではないので、ハンドルの切り角が浅かろうが深かろうが、変わりません。どちらかといえば深ければ深いほどクルマを曲げるのは難しくなるので、ハンドルの切り角は最少に。
アクセルが作用するリアタイヤはフロントと違い、残念ながらまっすぐ前にしか向いていません。アクセルをONにすればただクルマを前に押し出すだけで、曲がるのには使えません。
とくにTRC(トラクションコントロール)がついていた場合、滑りを検知して滑らないようにジワッとトラクションをかけるため、なお一層前へ押し出すこととなります。その結果、パイロンからは遠く離れるだけになってしまうというわけです。
ではどうすればいいか。まずTRCをOFFにします。
TRCをOFFにすると、アクセルをラフにあけることでいとも簡単にホイールスピンを起こします。ホイールスピンをするとどうなるかというと、グリップしないので前に進む力もなくなり、同時に横方向のグリップも失います。つまりリアが流れるという話です。
このリアの流れはそれまでのクルマのヨー方向の慣性モーメント、ヨーモーメントに依存します。
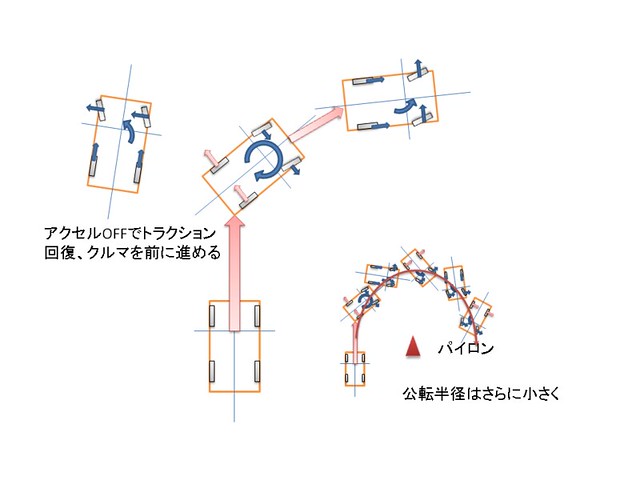
つまりちょっとハンドルを切って少しクルマが曲がり始めたところ、ヨーモーメントを発生させたところで、アクセルをボンとあけてタイヤをホイールスピンさせるとそのヨーモーメントを使ってクルマを回頭させることができるという次第です。
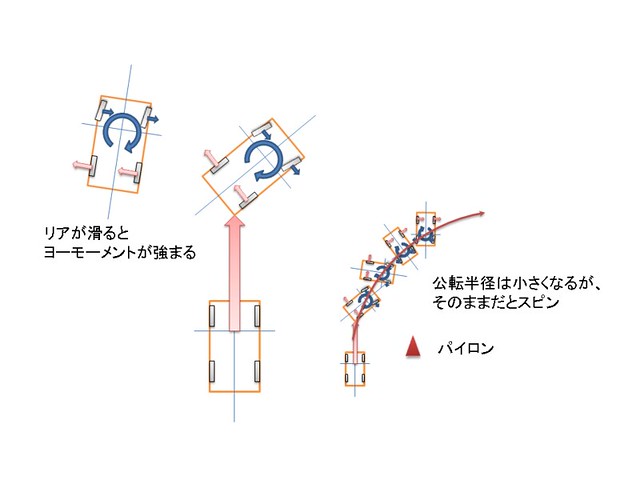
ところがクルマ自体の慣性はまだ残っているから、多少公転半径は小さくなる程度。
また問題になるのはヨーモーメントが残ったままということです。このままほっておくとクルマは重心を中心に曲がりすぎて、つまりスピンしてしまいます。
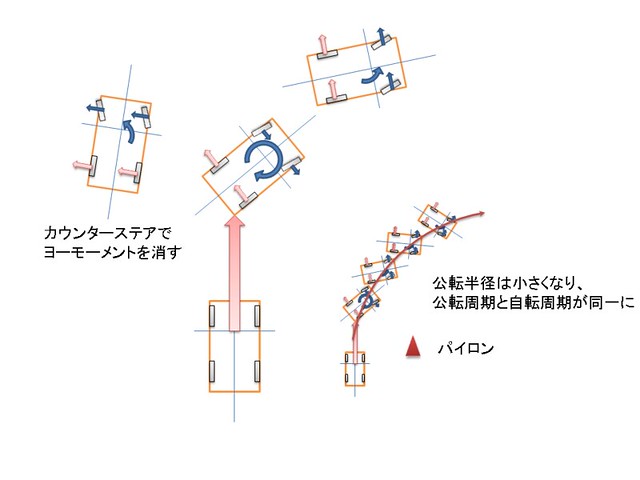
そこでスピンを防ぐ、過度なヨーモーメントを消すために、今度はハンドルを逆に切ります。いわゆるカウンターステアをあてる、という操作です。カウンターをあてるとフロントが外に逃げ、ヨーモーメントを減らすことができます。
公転半径を小さくするためには、今度はリアタイヤをグリップさせ、トラクションを与えて前に(内側へ)進めるわけです。実際の操作としてはアクセルオフのまま「グリップするのを待つ」、というとても消極的な操作、「操作しない、をする」を実践することになります。
するとクルマが前に(内側へ)進みはじめるので衛星軌道上に乗り始めます。
パイロンを地球とみたてると、その周りを回るクルマは月。
クルマのヨーモーメントは自転であり、クルマがパイロンに対してする旋回は公転です。定常円旋回とはクルマの自転と公転を一致させる作業なのです。
月の自転周期と公転周期はまったく同一で、常に月の表が地球に向いており、裏は永遠に見えません。これと同じことをクルマで行えばいいのです。それができれば常にパイロンに向かってつかず離れず、同じ角度でクルクル回ることができます。
【駆動方式:FF】
上記はFRでしたが、FFの場合はどうでしょう。
(動画は8の字ターン)
FFの場合、ハンドルがフロント、駆動輪(アクセル)もフロントとなっているので4輪を操作することができません。唯一残された手段、それは「サイドブレーキ」。
FRとの大きな違いはアクセルがフロントタイヤに作用するということ。ヨーモーメントに対してはリア駆動と「逆」に作用することになります。ということはどういうことかというと、ハンドルを切ってからアクセルをあけてスリップを失わせることは、してはいけないということです。
ハンドルを切ったらジワリとアクセルをあけてフロントで引っ張っていく、この場合はもしかしたらTRCが有効かもしれません。
ただこの場合でもリアタイヤはまっすぐ前をむいていて、転がっているだけですから最小回転半径よりも小さく回ることは不可能です。
そこで出てくるのが伝家の宝刀、サイドブレーキを使ったサイドターン。
FFのサイドブレーキが素晴らしいのは、クラッチなど気にせず、好きなときに好きなだけサイドをひける点です。
FRであれば駆動力がかかっているため、サイドブレーキを引く場合はクラッチを切る必要がありますし、ATでは駆動力が切れないので実質上サイドブレーキが使えません。しかしFFはそんな気遣い無用。MTでもATでサイドブレーキを効かせることができるんです。
FFで定常円旋回をする場合は、もっとパイロンによることになります。
というのも、サイドブレーキが作用するリアタイヤは「ロックするかしないか」しかコントロールできないからです。駆動力が発生しないため、単純にヨーモーメントを助長するかしないかのみとなります。
ハンドルを切り始めるまではFRと同じです。FRがアクセルONでリアを流すのに対し、FFの場合はサイドブレーキを引きます。
リアが流れ始めてヨーモーメントが大きくなってもアクセルを踏んではいけません。なぜならアクセルを踏むとフロントが前に引っ張るよりも先にホイールスピンして慣性モーメントでフロントが外に逃げ、ヨーモーメントを逆に減らしてしまうからです。
そのためFFの場合アクセル、ハンドルは一定で、サイドブレーキのみにで回転半径と速度を調整することになります。
ここで大事なのが進入速度。早ければ外にはらんで衛星軌道投入に失敗するし、遅ければ今度はリアが振りだせずヨーモーメントが作れません。FFはとても難しいです。
しかし一度決まればフロントはインへ引っ張り、リアはアウトに流せるためにパイロンに対してとても近い位置でクルクル、サイドミラー脇ぎりぎりのドアターンが決まるはずです。
【駆動方式:4WD】
(Audi TT、横置きV6エンジン)
さて四輪駆動はどうでしょうか。四輪駆動はカンタンにいえばFF+FRと考えればいいです。少し面倒なのがデフセッティング。デフロック直結4WDであれば比較的簡単に解釈できるのですが、一般車の4WDはデフやLSD機構が備わっているのでその挙動により左右されます。
アクセルを踏んだ時、4輪にどう駆動力がかかるのかというのが最大の違いであり、フロントとリアの駆動力、トラクションの違いでFF的なのか、FR的な挙動になるのかが決まります。あとはFFとFRと操作は変わらないでしょう。
自転と公転を一致させる、
これです。
【トラクションとモーメント】
すでに「トラクション」という言葉が出ましたが、トラクションとはなんでしょう?
トラクションとは「牽引力」のことで、タイヤで駆動するクルマの場合は
・タイヤのグリップ力(摩擦係数)
・タイヤへの荷重
で決まります。
いわゆる前後重量配分50:50は静止荷重のことで、実際に加減速やコーナリングをすると荷重が変化します。加速時は後ろに荷重がかかり、減速時は前に荷重がかかります。
ところが凍結路といった超低μ路となると、もはや荷重変動が起きません。となると静止重量配分がそのまま荷重となるといっても過言ではないです。
もうひとつ重要なのが重量物の配分です。
同じ前後重量配分50:50であったとしても、重量物のエンジンがホイールベース内にあるか、外にあるかでクルマの挙動は変わってしまいます。それが「モーメント(回転力)」です。
金槌を思い浮かべると分かりやすいですが、金槌をふつうに柄をもって振ると頭が重いので力が必要です。ところが逆に頭の部分をもって柄をふると軽々振ることができます。これがモーメントです。
重量物が重心から遠ければ遠いほど回す力が必要で、逆にいったん回りだすと止まりにくいです。
だからクルマの中でもっとも重いエンジン、そしてミッションといった重量物はなるべく中心に寄っている方が少ない力で回転させることができます。そのためレースカーはミッドシップが基本なのです。
トラクションで考えるとミッドシップの次にリアエンジンリア駆動(RR)、フロントエンジンフロント駆動(FF)が有利で、もっとも不利になるのがフロントエンジンリア駆動(FR)です。
一方モーメントで考えるとミッドシップの次にいいのが縦置きフロントエンジンや縦置きリアエンジンとなり、横置きフロントエンジンは不利となります。
実際にはさらにロール方向のモーメントが加わって考える必要があり、重心高、重量物の重心がかかわってきてややこしいことになります。
つまりまとめると、クルマはその構造で運動特性が大きく異なる、ということです。単純に駆動輪や駆動方式だけでは語れないということですね。この構造の違い、運動特性の違いが顕著に表れるのが氷上ということなのです。
次回は宇宙空間とモビルスーツとクルマについて。
(つづく)

